RDG-USB — Profesyonel GNSS-USB Geliştirici Köprüsü
Her milisaniyenin ve her metrenin kritik olduğu bir dünyada, donanımınız dar boğaz oluşturmamalı.
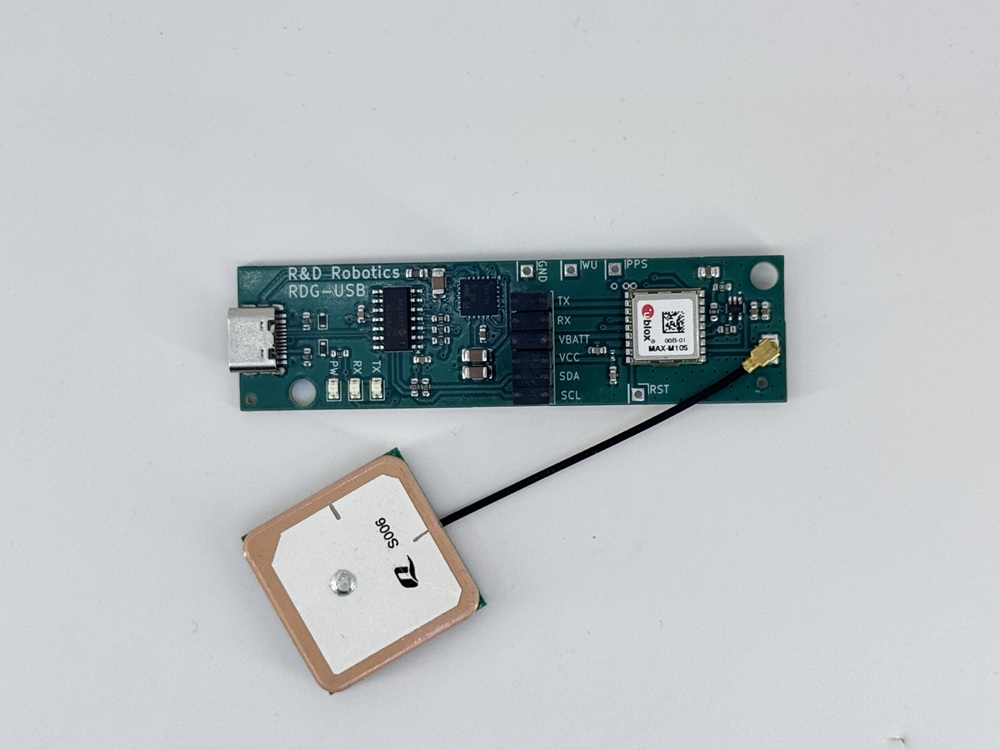
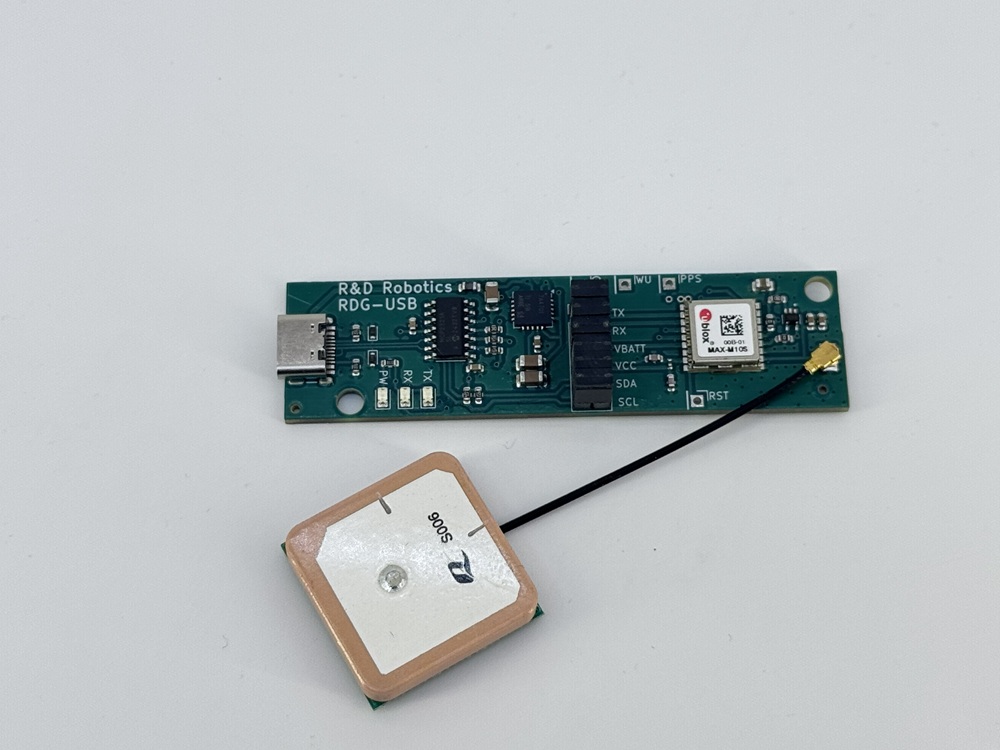
RDG-USB sıradan bir dönüştürücü değil; uyduların tüm gücünü kontrol etmeniz için bir davettir. Sektör lideri u-blox MAX-M10S ile dayanıklı Microchip MCP2221A'yı birleştirerek profesyonel bir geçit inşa ettik. Tak-çalıştır yapısıyla dünyanın en gelişmiş konumlama sistemleri (GPS, Galileo, BeiDou), verilerini doğrudan PC'nize, Raspberry Pi'nize veya endüstriyel kontrolcünüze teslim eder.
Mutlak Hassasiyet İçin Tasarlandı
● Eşsiz Kilitlenme Hızı: Dahili jumper sistemini kullanarak VBAT hattını izole edin. RTC ve Almanac verilerini korumak için harici bir batarya bağlayın; böylece konuma ihtiyaç duyduğunuz anda anında (instant fix) erişin.
● Geliştirici Özgürlüğü: Kart üzerindeki jumperlar, TX/RX hatlarını ayırmanıza olanak tanır. Donanım sizin—veri akışını tamamen kontrol edin veya kendi TTL sinyallerinizi sisteme dahil edin.
● Anten Avantajı: Küçük iz antenlerle yetinmiyoruz. Her RDG-USB, zorlu çevre koşullarında bile gökyüzünü net görebilmek için yüksek kazançlı 25mm x 25mm patch anten ile birlikte gelir.
Teknik Özellikler
- u-blox MAX-M10S GNSS Motoru (GPS, GLONASS, Galileo, BeiDou)
- Microchip MCP2221A USB-UART Köprüsü
- USB Type-C Bağlantısı
- Entegre TX/RX Aktivite LED'leri
- Zaman Senkronizasyonu İçin PPS (Pulse Per Second) Çıkışı
- Batarya Yedekleme Yönetimi İçin VCC/VBAT Jumper
- Genişlik: 20mm, Uzunluk: 76mm, Yükseklik: 14mm
Uygulama Senaryoları
RDG-USB çok yönlülük için tasarlanmıştır. USB yeteneklerinin ötesinde, ayrılabilir jumperlar favori geliştirme kartlarınızla doğrudan entegrasyon sağlar.
01 Doğrudan Raspberry Pi Entegrasyonu
USB köprüsünü devre dışı bırakmak için jumperları sökün ve u-blox modülünü UART üzerinden doğrudan Raspberry Pi GPIO'larına bağlayın.
- RDG-USB TX → RPi RX (GPIO15)
- RDG-USB RX → RPi TX (GPIO14)
02 Arduino Uno & SoftwareSerial
Ana donanımsal seri portun hata ayıklama (debug) için kullanıldığı projeler için idealdir. GNSS modülü ile herhangi bir dijital pin üzerinden haberleşin.
- RDG-USB TX → Arduino Pin 10 (Software RX)
- RDG-USB RX → Arduino Pin 11 (Software TX)
03 Hassas Zamanlama ve Anında Fix
Yedek bir batarya (CR2032) bağlamak için VBAT jumperını kullanın ve mikrosaniye hassasiyetinde zaman senkronizasyonu için PPS çıkışından yararlanın.
Uygulama Örneği (Python)
Veriye hükmedin. NMEA cümlelerini ayrıştırmak ve canlı koordinatlarınızı görselleştirmek için aşağıdaki betiği kullanın.
import serial
import pynmea2
import os
# ===== YAPILANDIRMA =====
SERIAL_PORT = "COM3"
BAUDRATE = 9600
def clear_console():
os.system('cls' if os.name == 'nt' else 'clear')
def main():
# Güncel verileri saklamak için sözlük yapısı
data = {
"lat": 0.0, "lon": 0.0, "alt": 0.0,
"sats": 0, "hdop": 0.0, "vdop": 0.0, "pdop": 0.0,
"speed": 0.0, "course": 0.0, "fix_quality": 0
}
try:
with serial.Serial(SERIAL_PORT, BAUDRATE, timeout=1) as ser:
print(f"{SERIAL_PORT} bağlandı. Fix bekleniyor...")
while True:
line = ser.readline().decode('ascii', errors='replace').strip()
if not line or not line.startswith('$'):
continue
try:
msg = pynmea2.parse(line)
if isinstance(msg, pynmea2.types.talker.GGA):
data["lat"] = msg.latitude
data["lon"] = msg.longitude
data["alt"] = msg.altitude
data["sats"] = msg.num_sats
data["fix_quality"] = msg.gps_qual
render_display(data)
elif isinstance(msg, pynmea2.types.talker.GSA):
data["pdop"] = msg.pdop
data["hdop"] = msg.hdop
data["vdop"] = msg.vdop
elif isinstance(msg, pynmea2.types.talker.RMC):
data["speed"] = msg.spd_over_grnd
data["course"] = msg.true_course
except pynmea2.ParseError:
continue
except Exception as e:
print(f"Hata: {e}")
def render_display(d):
clear_console()
print("=== GNSS Canlı Akış (pynmea2) ===")
print(f"Konum: {d['lat']:.6f}, {d['lon']:.6f}")
print(f"Uydu: {d['sats']} | Fix Kalitesi: {d['fix_quality']}")
print(f"Hareket: {d['speed']} knots, {d['course']}°")
if __name__ == "__main__":
main()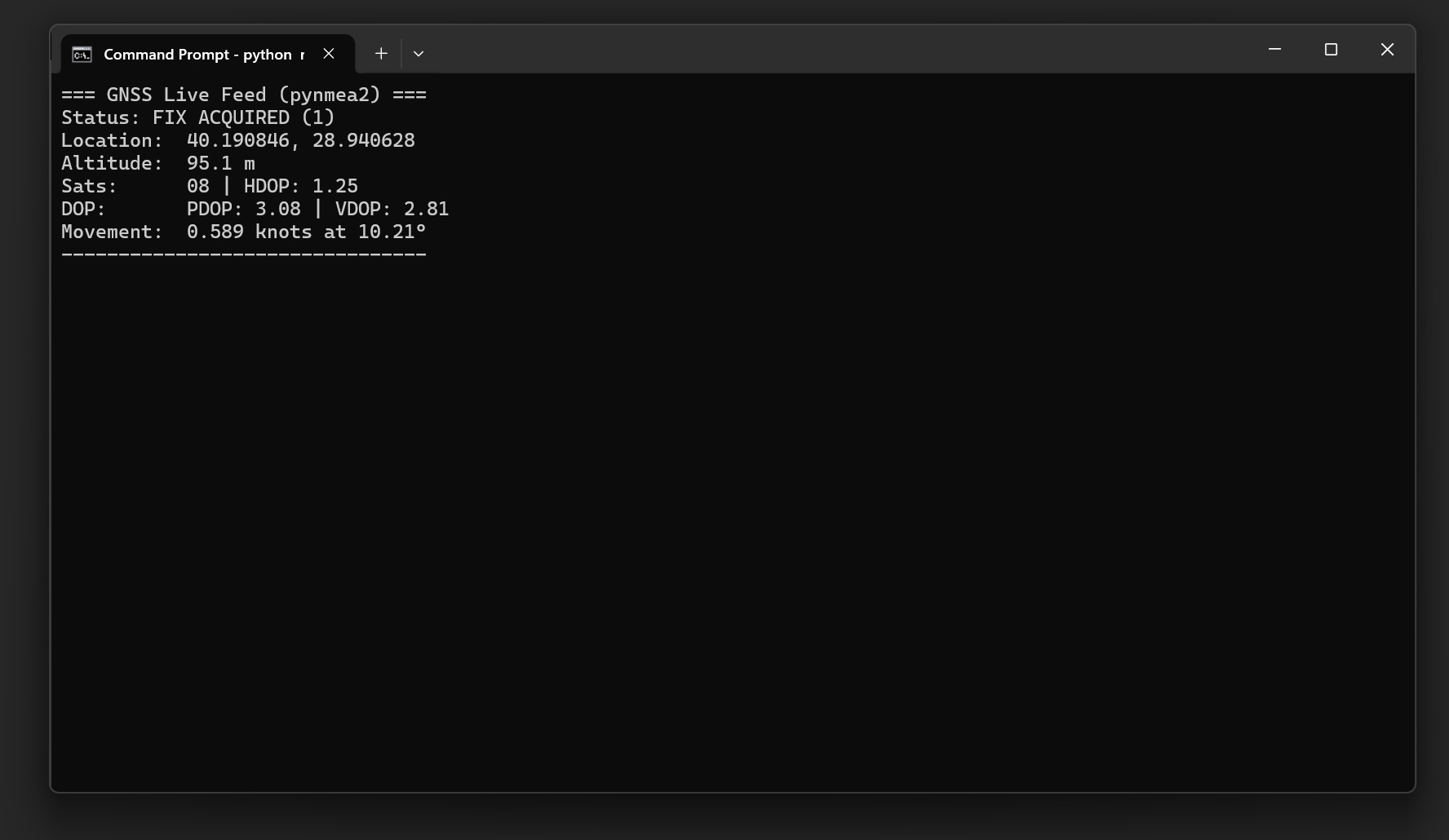
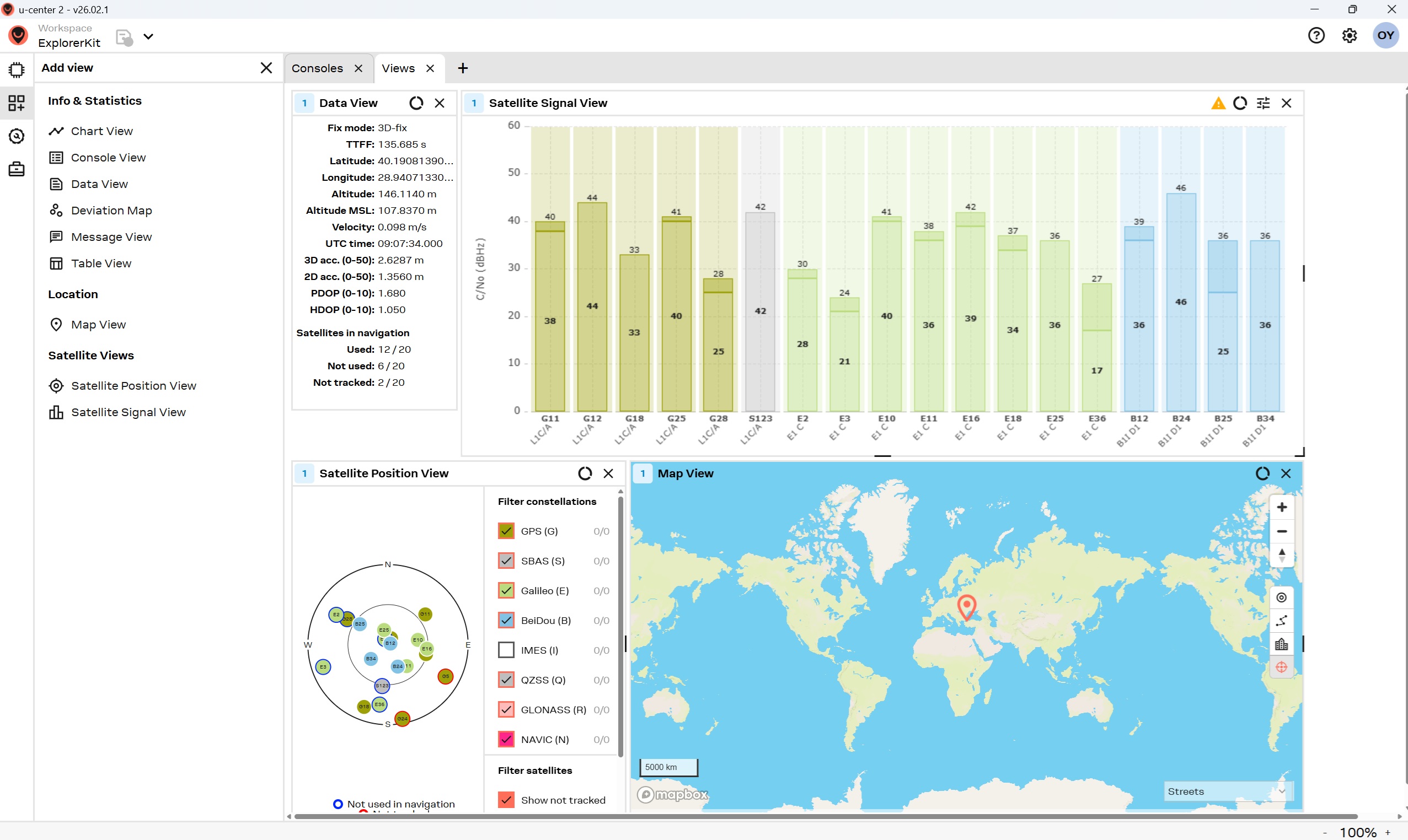
u-center 2 Yazılım Görünümü
RDG-USB, u-blox'un tescilli araçlarıyla tam uyumludur. Aşağıda u-center 2 yazılımının canlı uydu görünümü yer almaktadır.